








-
Development of Perching and Fail-Safe Module for Wall Climbing Multi-Copter
Taewan Kim, Christian Tirtawardhana, Byeongho Yu, I Made Aswin Nahrendra, Seok-Tae Kim, and Hyun Myung · RiTA, 2022
-
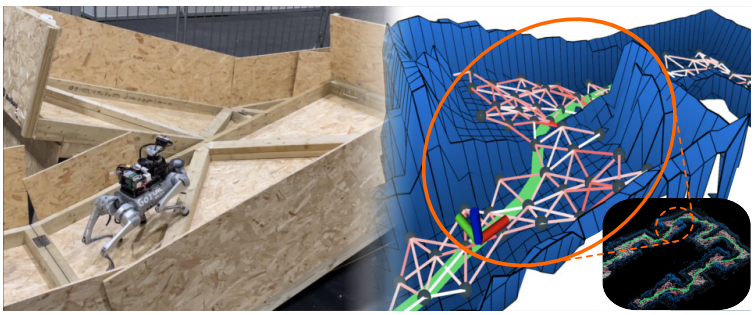
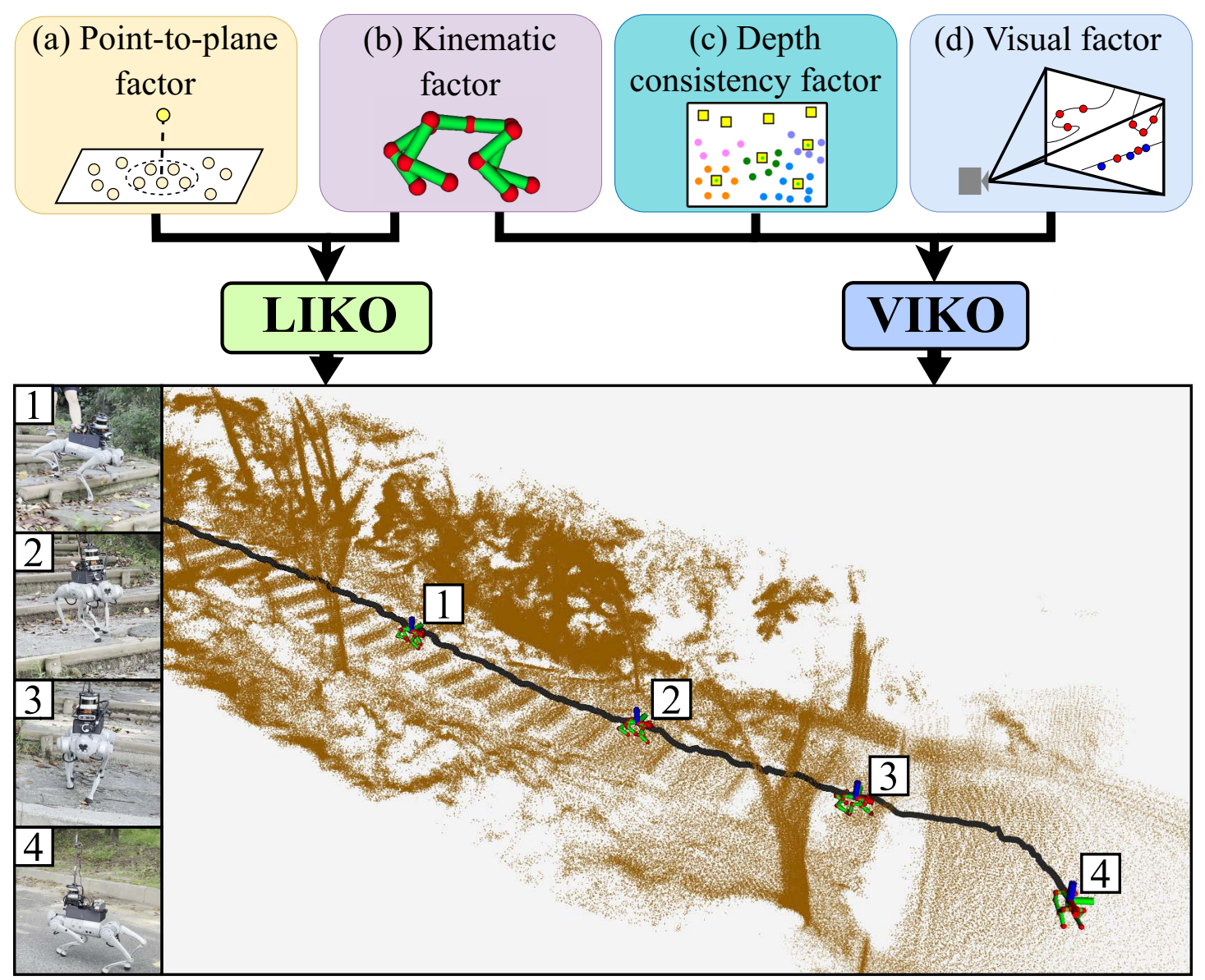
A Robust State Estimator for Legged Robots using Visual-Inertial-Leg Kinematics Information in the Wild
Byeongho Yu, Yeeun Kim, Jinwoo Jeon, I Made Aswin Nahrendra, and Hyun Myung · ICCAS, 2022
-
Development of Cleaning Module for Wall Climbing Drone with Bio-inspired Watering Mechanism
Taewan Kim, Christian Tirtawardhana, Byeongho Yu, I Made Aswin Nahrendra, and Hyun Myung · ICCAS, 2022
-
Segmented Encoding for Sim2Real of RL-Based End-To-End Autonomous Driving
Seung-Hwan Chung, Seung-Hyun Kong, Sangjae Cho, I Made Aswin Nahrendra · IEEE IVS, 2022
-
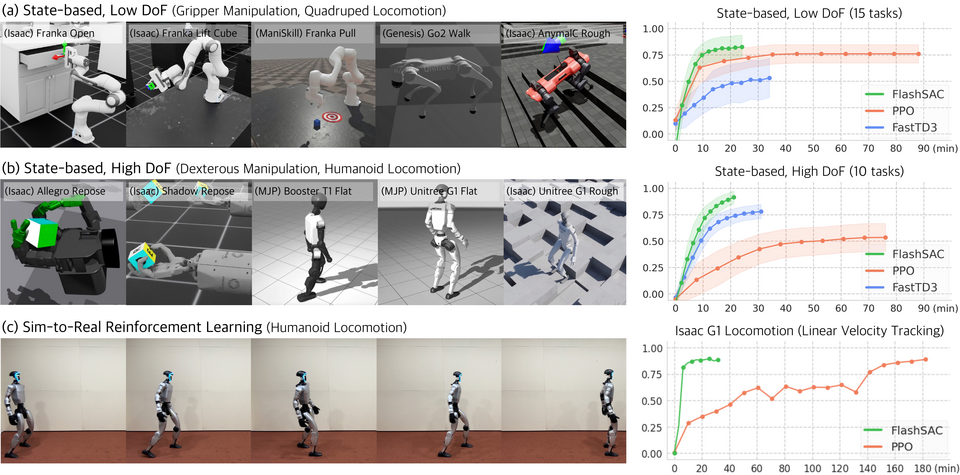
Enhanced Off-Policy Reinforcement Learning With Focused Experience Replay
Seung-Hyun Kong, I Made Aswin Nahrendra, Donghee Paek (*Equal contribution) · IEEE Access, 2021
-
Adaptive Control of Cyber-Physical Distillation Column Using Data Driven Control Approach
I Made Aswin Nahrendra, Pranoto Hidaya Rusmin, Egi Muhammad Idris Hidayat · IEEE ICEEI, 2019
-
I Made Aswin Nahrendra, Widyawardana Adiprawita, Adrian Susanto, Stefanus Kevin Hadinata · IEEE ISESD, 2018

Research Scientist
KRAFTON AI, Rep. of Korea
Physical AI Team
Sep. 2025 - present